Let's have a look at what I've been working on.
The Malenki-Nano is control module board for robot builders, intended for small robots of 150g or less, where weight and space are important.
Traditionally, a separate receiver and speed controller(s) were used. This is great but it means there are a lot of messy wires to get tangled / broken and take up space inside the robot. The integrated module reduces wiring and is lighter than a traditional rx / esc combination.
My module's specs are:


The Malenki-Nano is control module board for robot builders, intended for small robots of 150g or less, where weight and space are important.
Traditionally, a separate receiver and speed controller(s) were used. This is great but it means there are a lot of messy wires to get tangled / broken and take up space inside the robot. The integrated module reduces wiring and is lighter than a traditional rx / esc combination.
My module's specs are:
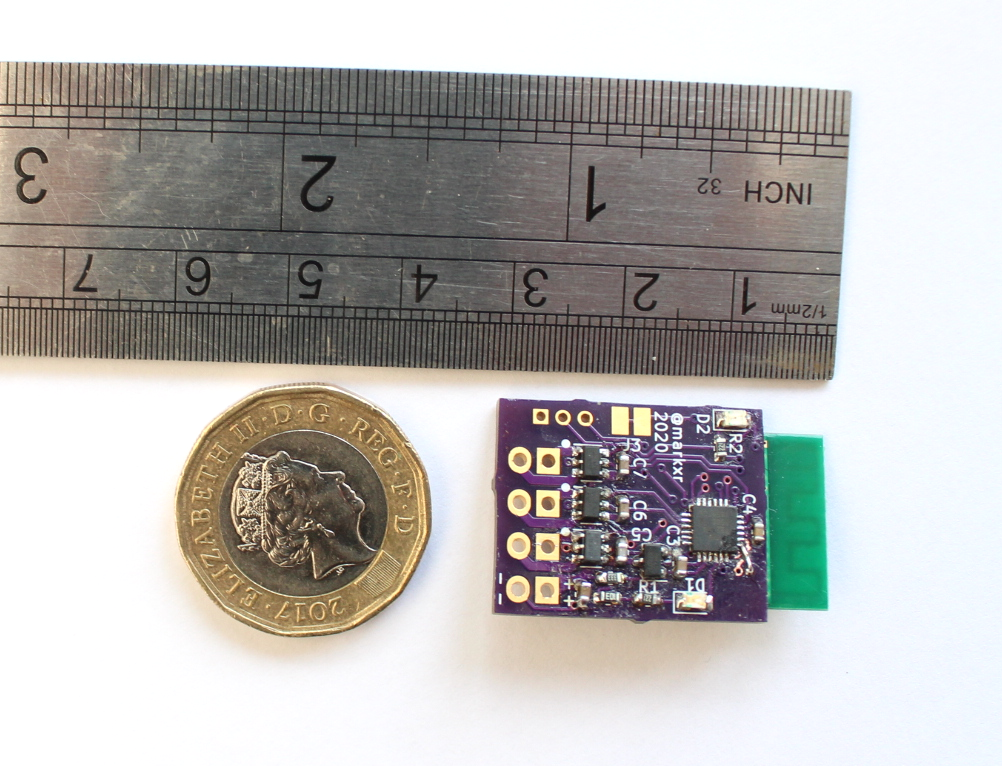
- A PCB with radio module mounted on top, dimensions approx 30x20 mm
- Overall height ~ 10mm (because of the very large crystal oscillator can on the radio, I cannot easily fix this)
- Electronic speed controller: three channels of DC brushed motors @ 1.8A per channel maximum
- Power input - 1-2S lipo pack (minimum ~3.6V, maximum 8.4V)
- Radio protocol: "AFHDS 2A" which is used by many cheap radios (e.g. those sold by Hobbyking)
- Antenna: PCB trace "F" antenna (see picture) - seems to give a range of at least 20 metres indoors, which is enough for robot combat.
- Auxilliary channels - 2x PWM output for other devices e.g. brushed ESC or servo.
- (NO built-in BEC / 5v regulator; the device uses 3.3v internally)
- Weight: < 4g excluding wires

Status:
* This module, pictured above, works in its current prototype, but there are a lot of changes I need to do, including swapping the motor driver chips and fixing a few minor problems with the pcb layout.
I also need to test it with more different transmitters.
Availability:
I may be able to make some of these boards available to purchase, later in the year 2020. Update: fill in this contact form if you are interested, and I will get back to you.
No comments:
Post a Comment